

Building a Digital Twin
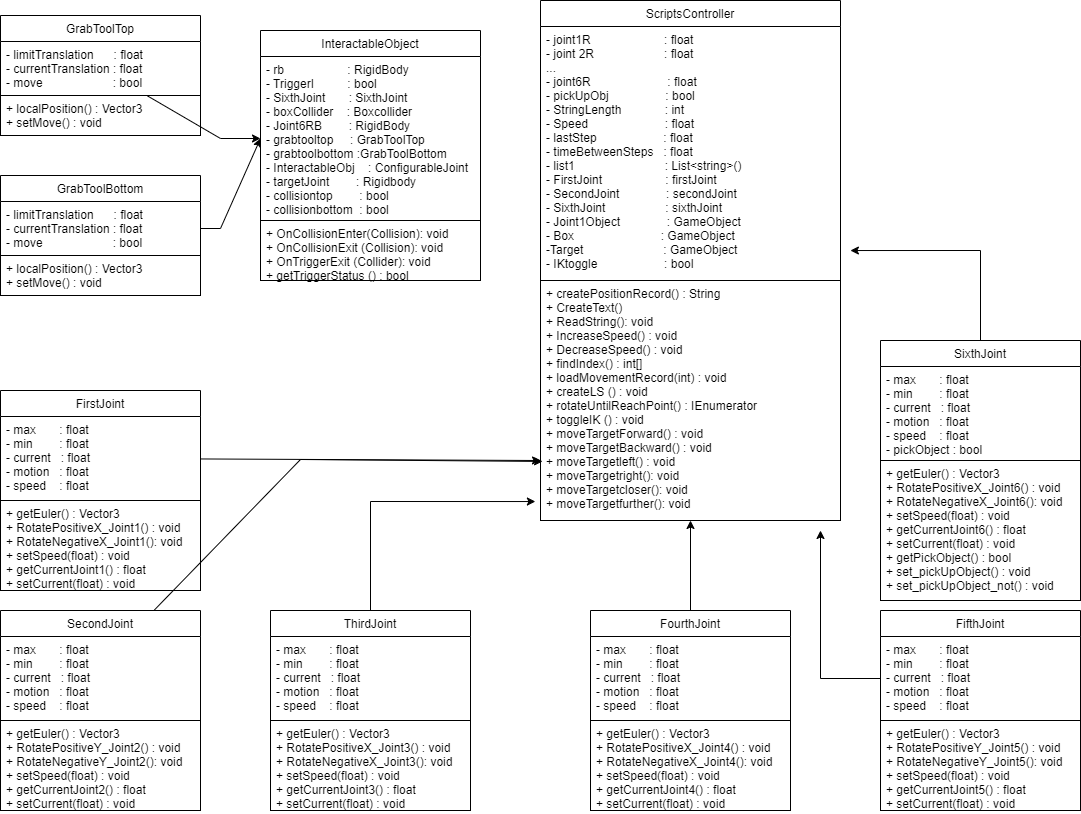
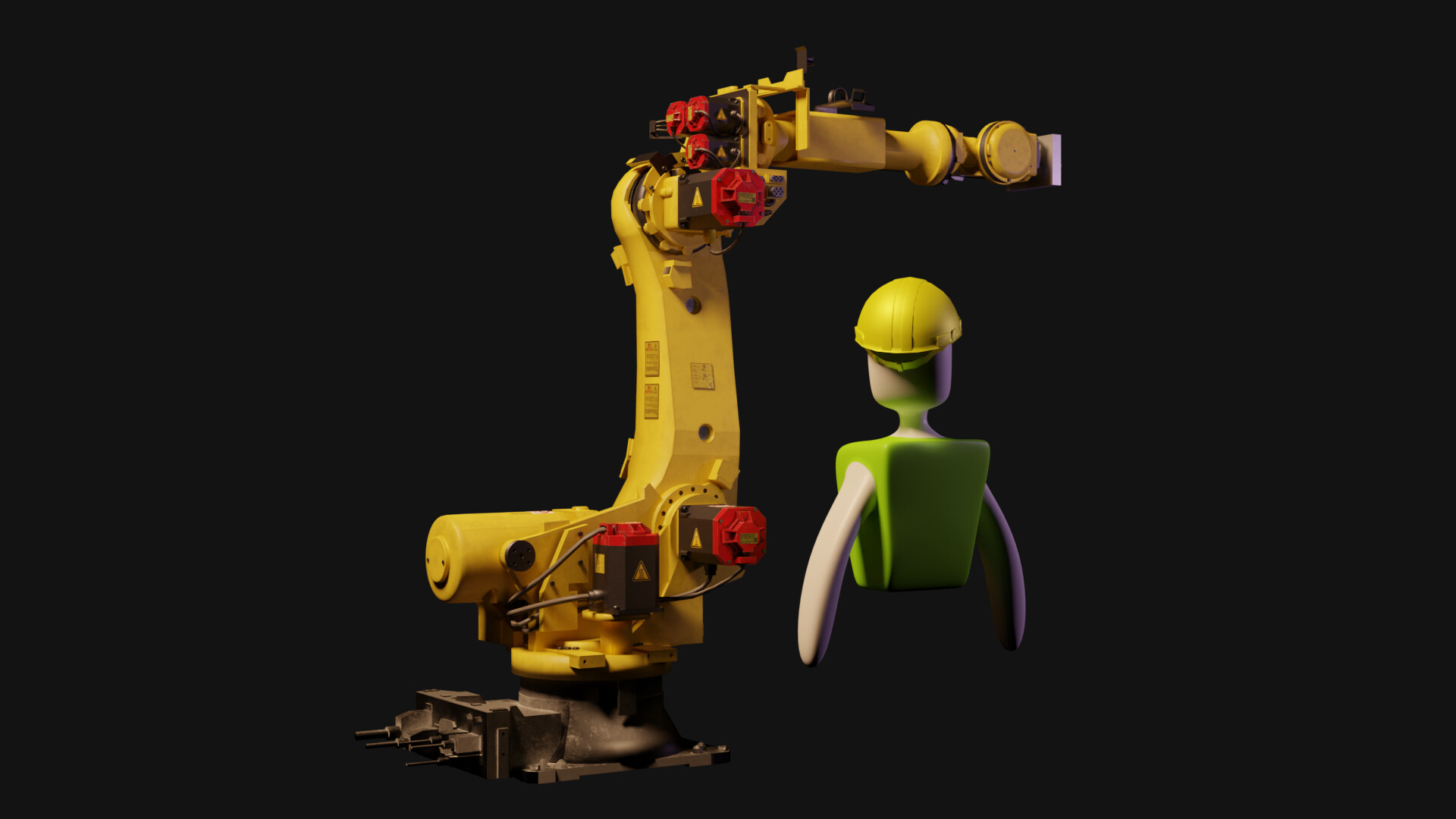
I was in charge of building a 3D robot that resembles the functionality and looks of the original one that was given to WKU. After making some measurements and analyzing the documentation of the robot I started building a 3D version of it in Blender. With a rough 3D sketch of it, I started implementing the movement of each joint of the robot in Unity. These movements were tested and tweaked by the rest of the team to improve the accuracy of it. When I had the model completely done, I started implementing Inverse Kinematics for the joints. I imported the robot I made into Maya to build a rig for it and be able to move it using FK and IK. Using the rig as a reference for the Robot in Unity, I created an script that controls the robot using IK.
To control every movement of the robot I made a Scripts Controller that is able to toggle between the 2 motions, change the speed of the movement of the robot, allocate each momevement that the robot has done in a dynamic array and repeat these movements. I Please visit the Github repository that contains the documentation of all methods and classes I created for the robot in unity to learn more.
List of contributions to the project
Here is a summary of all what I did and I learn while working on this project:
- Implemented Robot Locomotion using C#, including local and world movement with rotation limits.
- Coded a storage motion system to repeat robot movements or loop them.
- Make all the documentation of the Robot project in Unity and teach new students on how to use it
- Prepared the project to work on Oculus Quest 2 and Microsoft HoloLens
- Modeled, Textured and Rigged the 3D version of the Robot
- Designed a virtual simulation for students to learn how a manufacturing robot works